Case Study
We selected 9 examples for case study, of which case.1 was presented in our paper and many of the remaining were selected from existing papers.
Users can click the Load Tree button of the interface and load them under the project’s examples folder
CASE1: Recharge, Monitoring, and Answer
(1) Description
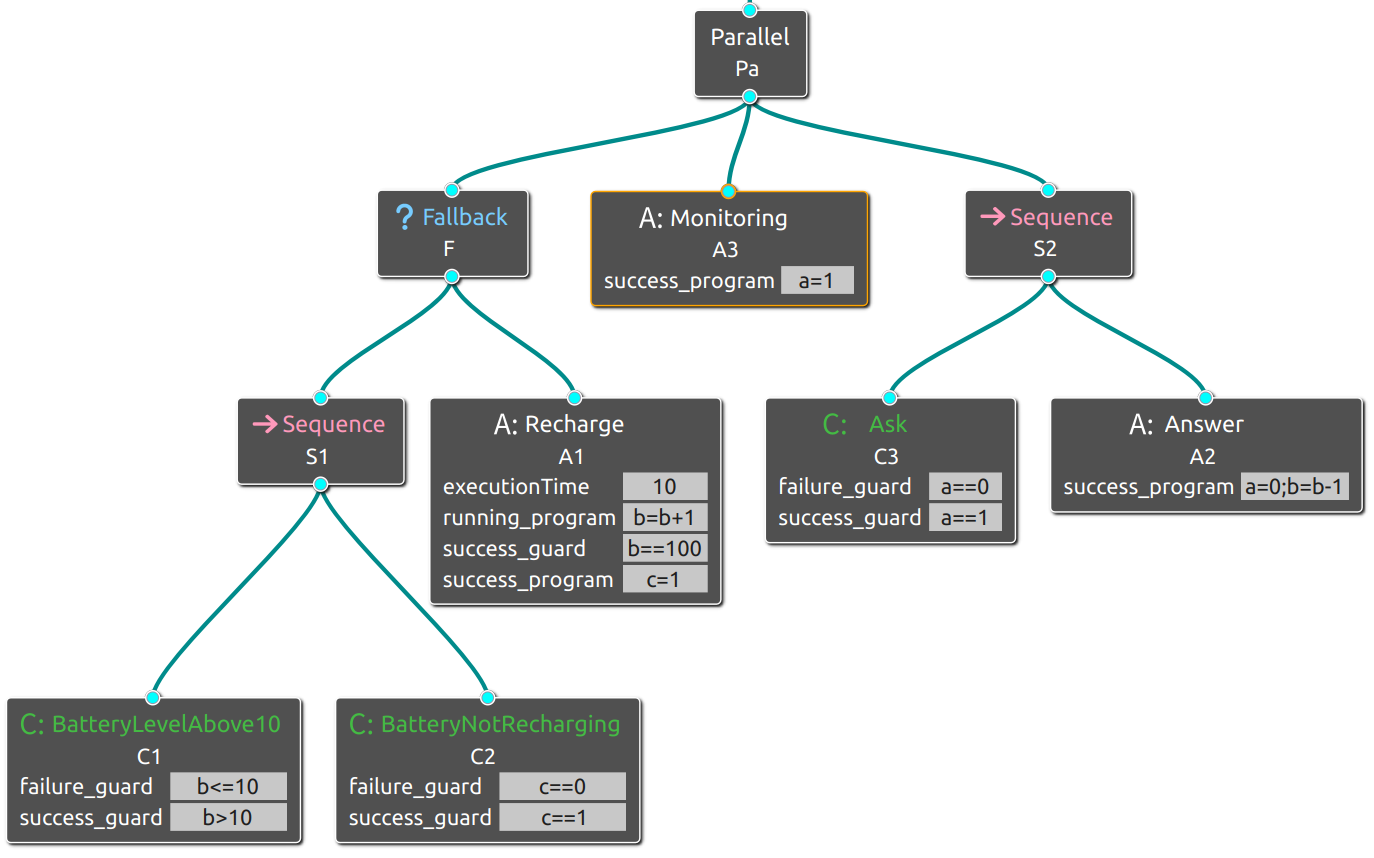
This BehaviorTree is from our paper, it specifies that the robot can simultaneously recharge while monitoring for a user ask and providing an answer.
The robot’s tasks can be divided into three parts: Recharge, Monitor, and Answer, which run in parallel. For the Recharge part, if the robot’s battery level is above 10% while the robot is not under recharging, the robot does not need to recharge immediately. In other cases, the robot must recharge or keep recharging until the battery level reaches 100%. Robot increases its charge by 1% for every 10 time units that pass while recharging. In the Monitor and Answer parts to facilitate the answer response, we implemented a communication by using a shared variable a. When the action node Monitoring succeeds, it sets a to 1. The condition node Ask only returns success when a equals 1, which enables the execution of the action node Answer. After the successful execution of Answer, a is set to 0.
(2) Behavior Tree
(3) Variables
Name: a (user ask?) Name: b (battery level)
Value: 0,1 Value: [0,100]
Meaning: 0: no. 1: yes. Meaning: battery level range from 0% to 100%.
Initial Value: 1 Initial Value: 5
Name: c (recharging status)
Value: 0,1
Meaning: 0: in recharging. 1: not in recharging.
Initial Value: 1
(4) Property
1.LTL property
a=1,b=5,c=1
#assert BehaviorTree |= G (BatteryLevelAbove10_f -> X(Recharge_s || Recharge_f || Recharge_r));
This assert means that once the robot’s battery level drops below 10% ,Recharge should be the next action.
2.Timed behavior property
Verification setting:
a=1,b=20,c=0 Deadline Time:300
#define goal1 b==40 ;
#define goal2 b==60 ;
#assert DeadlineProcess reaches goal1;
#assert DeadlineProcess reaches goal2;
We defined two battery level goals, and use this two asserts to check if the robot can be charged to 40% or 60%.
(5) Result
(a)LTL property verification result
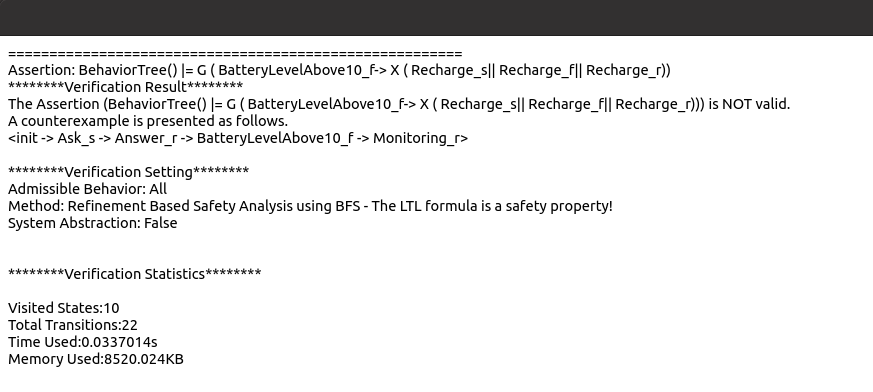
The verification result is not valid with a counterexample path. This counterexample implies that even if the robot’s battery level is below 10%, it may still execute other parallel tasks, such as nodes Monitoring, Ask, and Answer.
Therefore, we can add a requirement such that nodes Monitoring, Ask, and Answer cannot be executed when the battery level is below 10%. We can achieve this by adding a guard b > 10 to these three nodes. The image below is the new BehaviorTree:
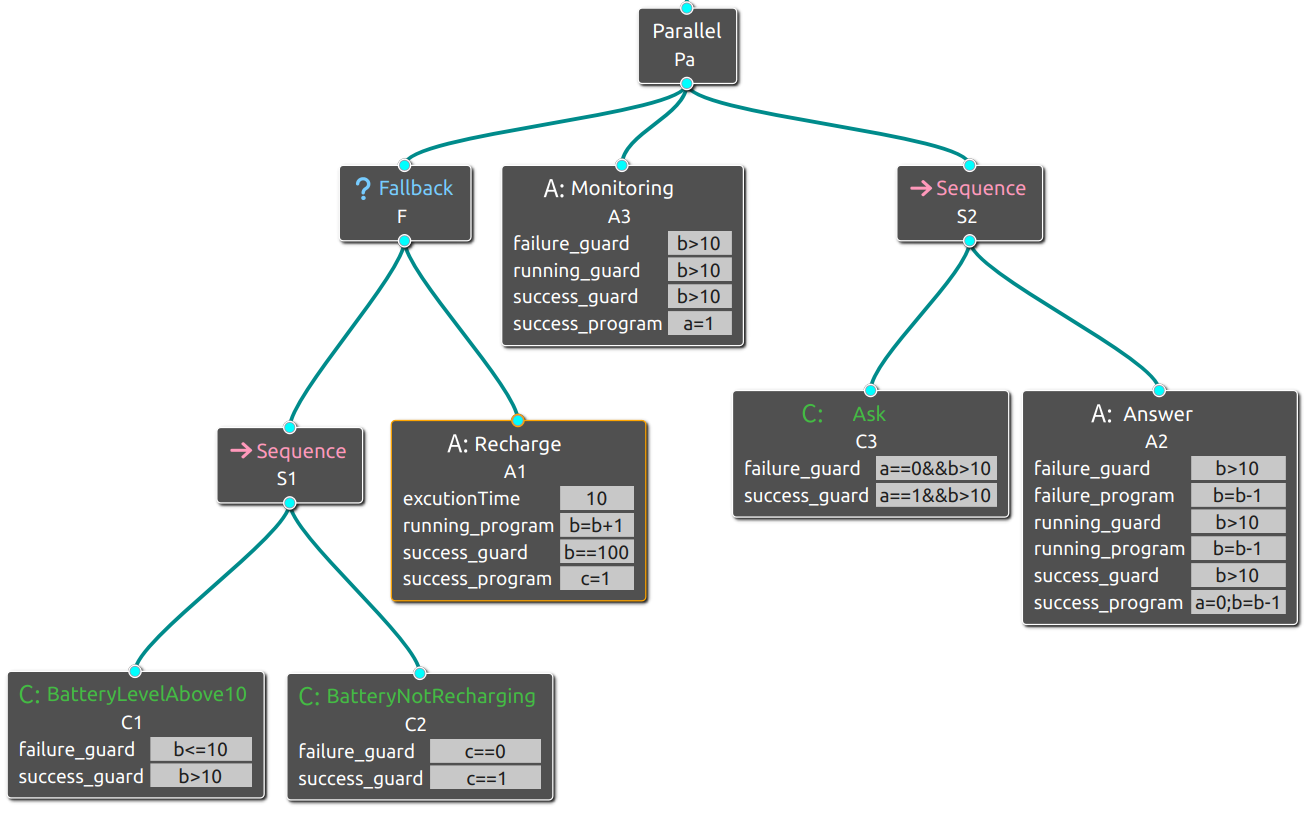
After modifying the BT, the verification result is valid. Therefore, we construct a better BT by utilizing the counterexample.
(a)Timed behavior property verification result
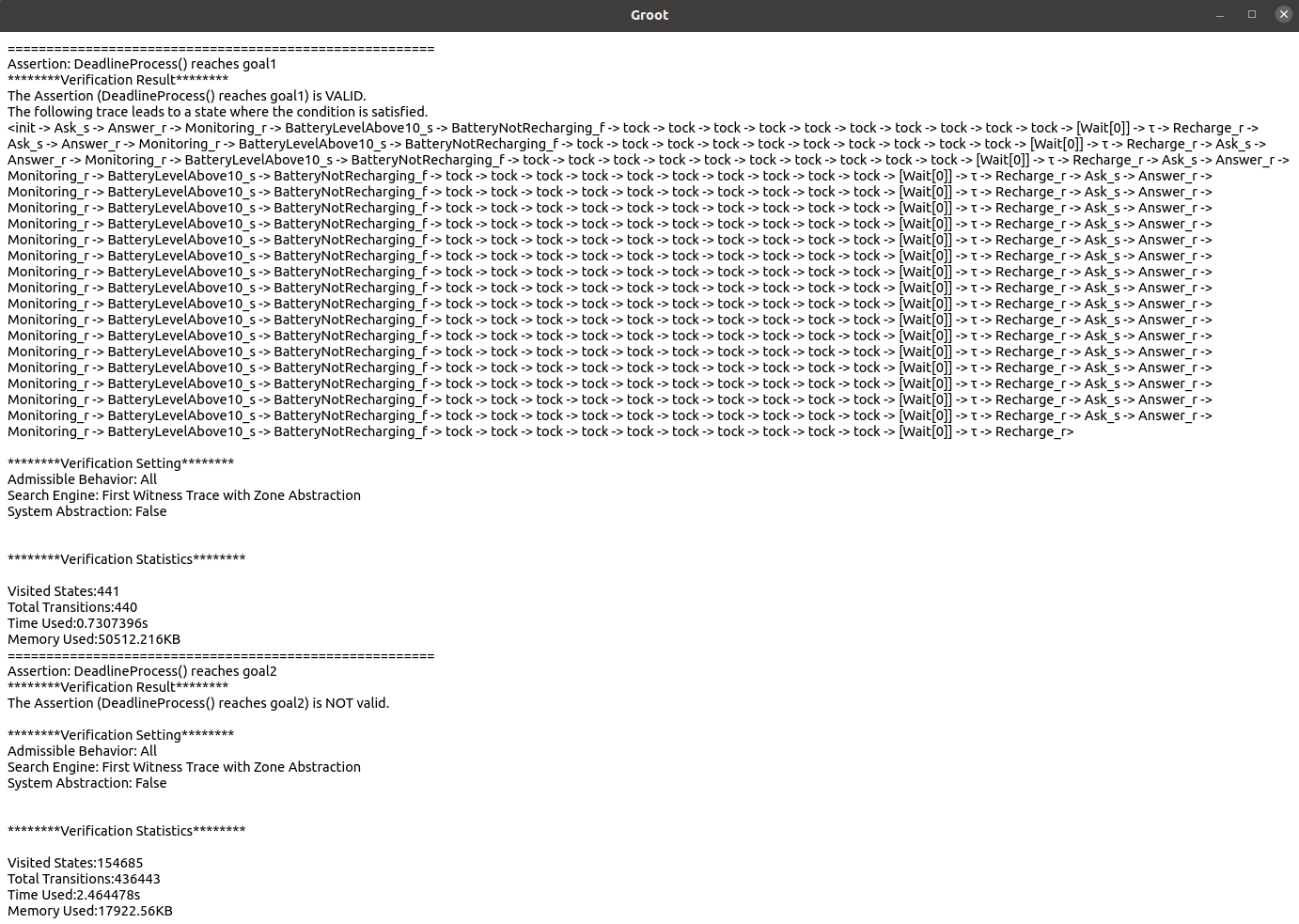
Verification results indicate that goal1 is reachable, while goal2 is unreachable, which means that the robot can be charged up to 40% within 300 units of time, but it is not possible for it to reach 60%.
CASE2: Pick and Place(1)
(1) Description
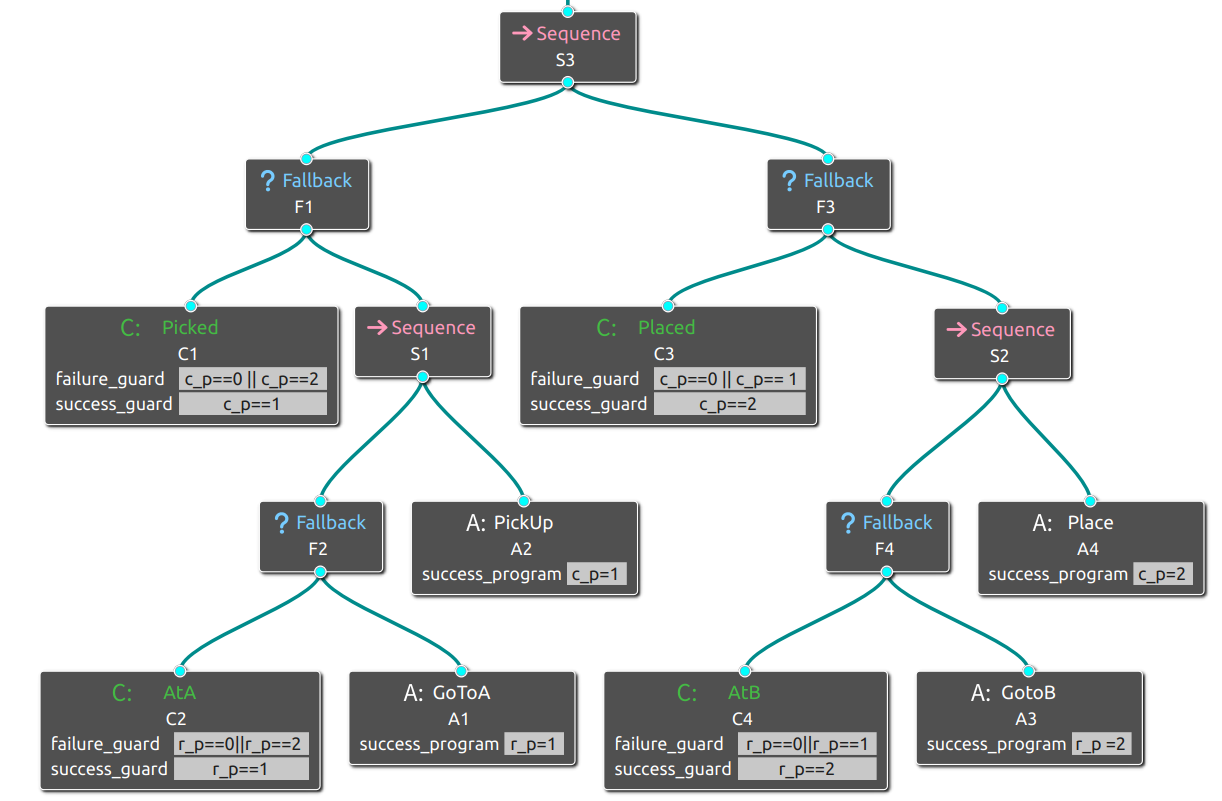
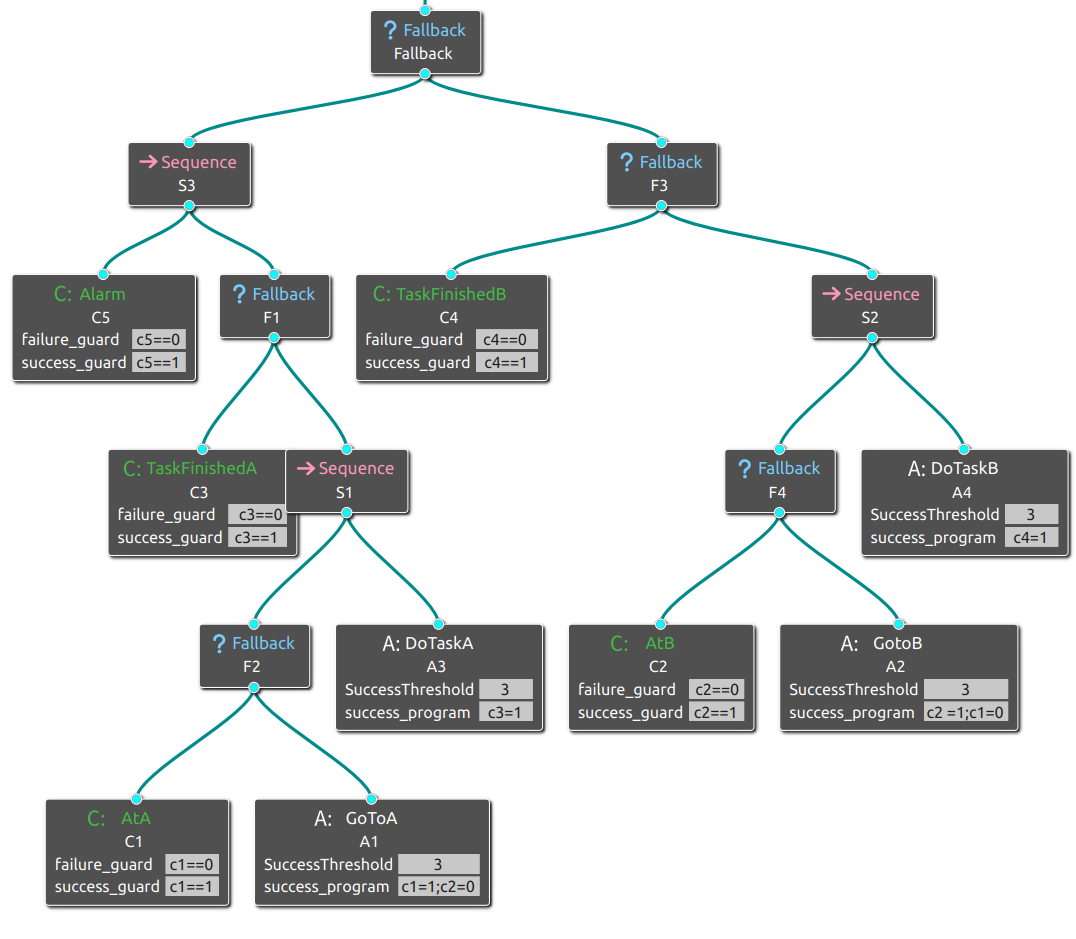
This BT requires a robot to pick up a cube at point A and then place it at point B. The BT’s execution can be divided into two phases: the left side is the Pick phase, and the right is the Place phase. The BT first checks whether Picked holds for the Pick phase. If it does, the BT executes the Place phase; otherwise, it checks AtA. If it holds, the BT can perform PickUp directly; Otherwise, the BT drives the robot first to execute GoToA, and then perform PickUp. The BT first checks whether Placed holds for the Place phase. If it does, the robot has completed the task; Otherwise, the BT checks whether AtB holds. If it does, the BT can perform Place directly; Otherwise, the BT should first execute GoToB, and then perform Place.
(2) Behavior Tree
(3) Variables
Name: c_p (cube position)
Value: 0,1,2
Meaning: 0: neither at A nor at B. 1: at A. 2:at B.
Initial Value: 0
Name: r_p (robot position)
Value: 0,1,2
Meaning: 0: neither at A nor at B. 1: at A. 2:at B.
Initial Value: 0
(4) Property
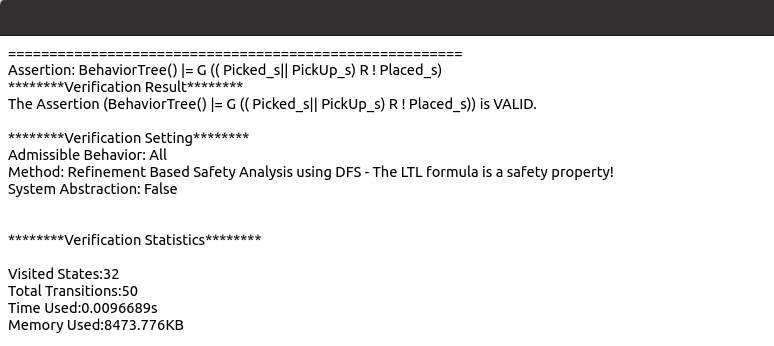
#assert BehaviorTree |= G ( (Picked_s||PickUp_s) R !Placed_s ) ;
This assert means the robot can’t place down the cube until it has successfully picked up the cube. But the robot may not be able to finally get the cube, because the action GotoA and PickUp may always return running or failure (or you can add success threshold to these two nodes to guarantee that they will return success).
(5) Result
CASE3: Pick and Place(2)
(1) Description
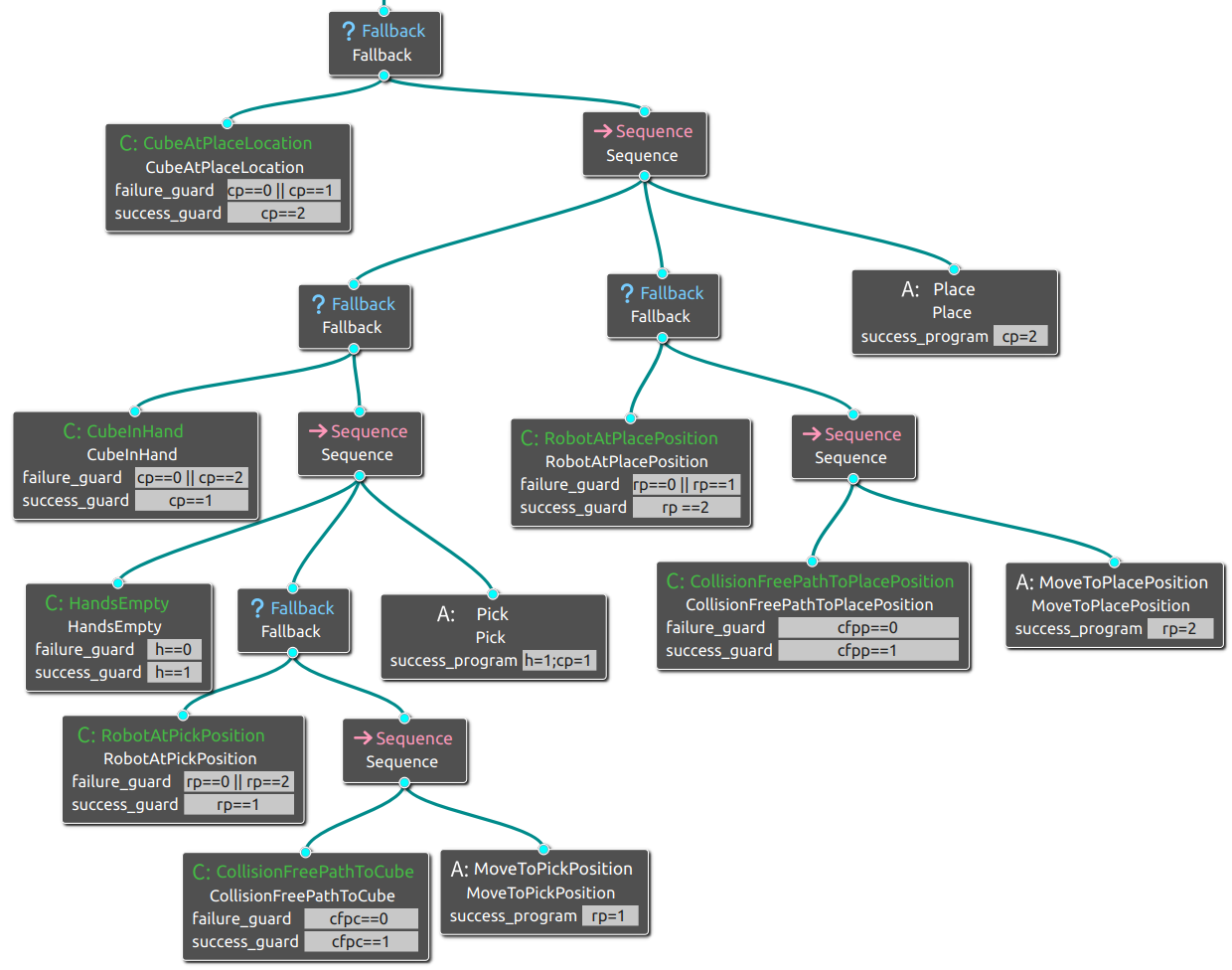
This BehaviorTree is from paper Towards Blended Reactive Planning and Acting using Behavior Trees (Figure 3(e) in this paper).
The robot is asked to pick up a cube from one location and place it in another. And the movement of the robot requires a collision free path.
(2) Behavior Tree
(3) Variables
Name: cp (cube position?) Name: rp (robot position?)
Value: 0,1,2 Value: 0,1,2
Meaning: 0: unkown. 1: in robot's hand. 2: at place position. Meaning: 0: unkown. 1: pick position. 2: place position.
Initial Value: 0 Initial Value: 0
Name: cfpp (collsion free path to place position exist?) Name: cfpc (collsion free path to cube exist?)
Value: 0,1, Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 1 Initial Value: 1
Name: h (robot hands empty?)
Value: 0,1
Meaning: 0: no. 1: yes.
Initial Value: 0
(4) Property
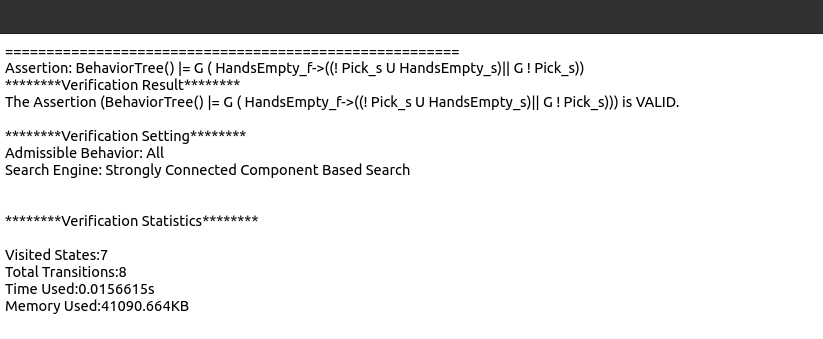
#assert BehaviorTree |= G (HandsEmpty_f -> ((!Pick_s U HandsEmpty_s) || G !Pick_s)) ;
This assert means that when the robot’s hand is not empty, it cannot pick up the cube until its hand is empty.
(5) Result
CASE4: Alarm
(1) Description
periodically do taskA (if Alarm) or do taskB (if no alarm).
(2) Behavior Tree
(3) Variables
Name: c1 (Robot at A?) Name: c2 (Robot at B?)
Value: 0,1 Value: 0,1
Meaning: 0: at A. 1: not at A. Meaning: 0: at B. 1: not at B.
Initial Value: 0 Initial Value: 0
Name: c3 (Task A finished ?) Name: c4 (Task B finished ?) Name: c5 (Alarm ?)
Value: 0,1 Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 0 Initial Value: 0 Initial Value: 0
(4) Property
#assert BehaviorTree |= G (Alarm_s -> ((!DoTaskB_s U Alarm_f) || G !DoTaskB_s)) && G (Alarm_f -> ((!DoTaskA_s U Alarm_s) || G !DoTaskA_s));
This assert means task B cannot be done when there is an alarm, and task A cannot be done when it is not an alarm.
(5) Result

CASE5: Fetch Bottle
(1) Description
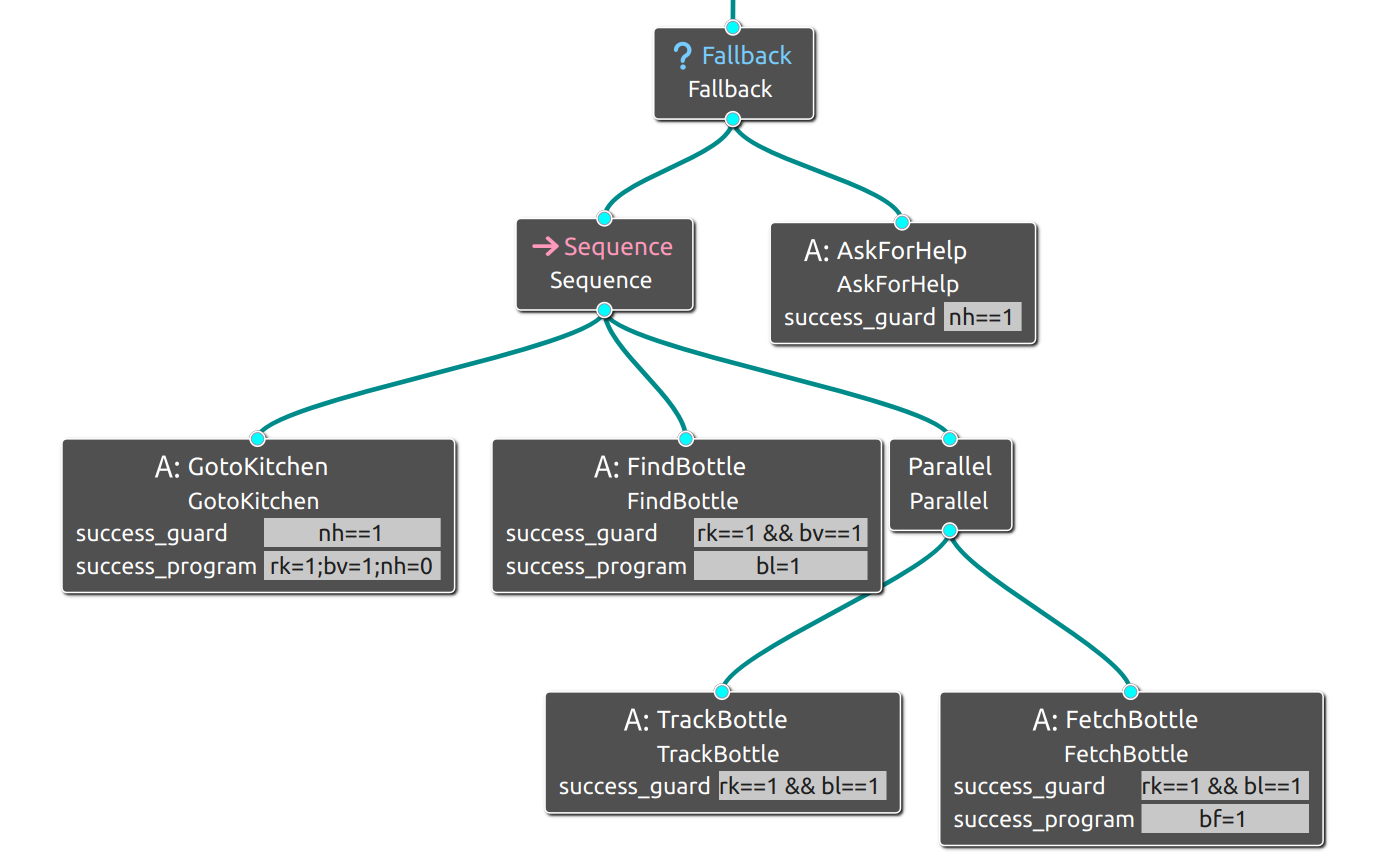
This BehaviorTree is from paper Conditional Behavior Trees: Definition, Executability, and Applications (Figure 1 in this paper).
The robot is asked to go to the kitchen to get the bottle, and if it cannot complete it, it should ask human for help.
(2) Behavior Tree
(3) Variables
Name: rk (robot in kitchen?) Name: bv (bottle bisible?)
Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 0 Initial Value: 1
Name: bl (bottle located?) Name: bf (bottle fetched?) Name: nh (robot near human?)
Value: 0,1 Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 1 Initial Value: 0 Initial Value: 0
(4) Property
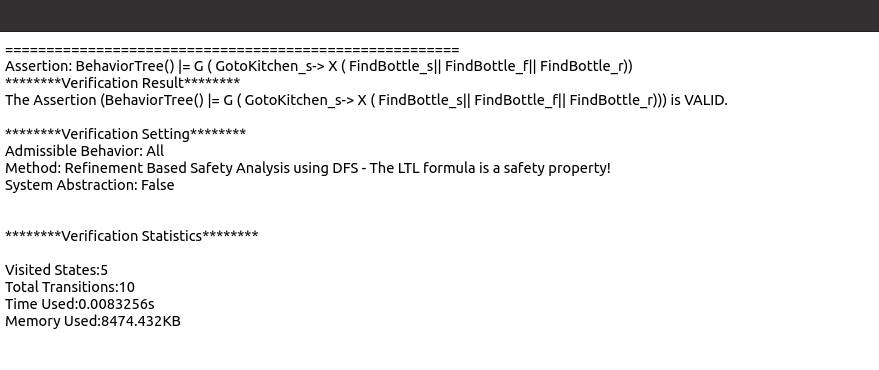
#assert BehaviorTree |= G (GotoKitchen_s -> X(FindBottle_s || FindBottle_f || FindBottle_r));
This assert means that only after the robot has successfully entered the kitchen can it find the bottle.
(5) Result
CASE6: Get Food
(1) Description
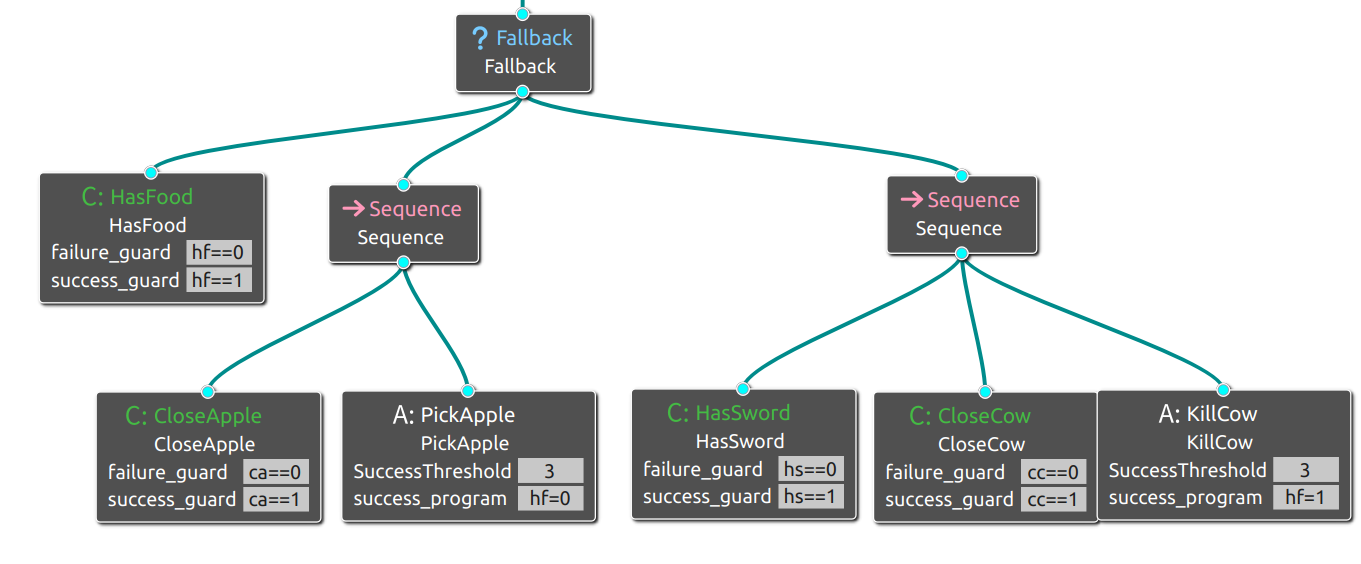
This BehaviorTree is from paper Improving the Performance of Backward Chained Behavior Trees that use Reinforcement Learning (Figure 2 in this paper).
When the agent has no food, it will first consider picking apples. If there are no apples nearby to pick, it will consider killing cows. Killing cows needs to meet the two conditions of having a sword in hand and being close to cows.
(2) Behavior Tree
(3) Variables
Name: hf (has food?) Name: ca (close to apple?)
Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 0 Initial Value: 0
Name: hs (has sword?) Name: cc (close to cow?)
Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 1 Initial Value: 1
(4) Property
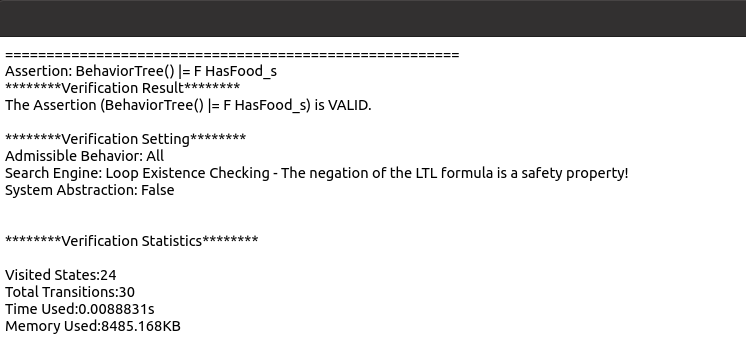
#assert BehaviorTree |= F HasFood_s;
This assert means that the agent will eventually get food.
(5) Result
CASE7: Mars-Rover
(1) Description
This BehaviorTree is from paper A Framework for Formal Verification of Behavior Trees With Linear Temporal Logic (Figure 1 in this paper).
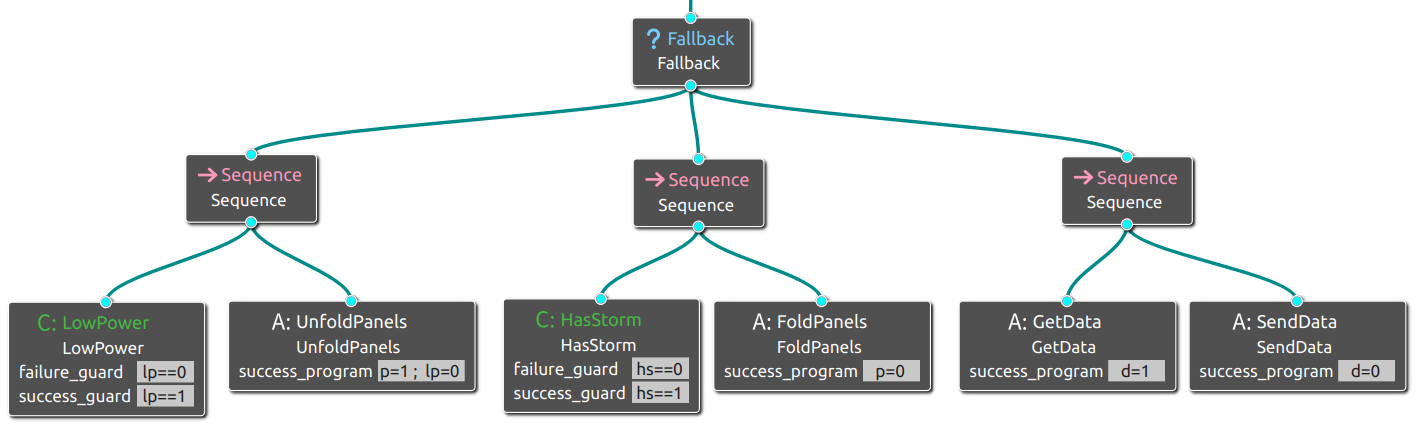
Mars-Rover unfold the solar panels when the battery is low, fold the solar panels when there is a storm, collects and sends data when the battery is not low and there is no storm.
(2) Behavior Tree
(3) Variables
Name: lp (low power?) Name: p (Panels fold?)
Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 0 Initial Value: 0
Name: hs (has storm?) Name: d (has data?)
Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 0 Initial Value: 0
(4) Property
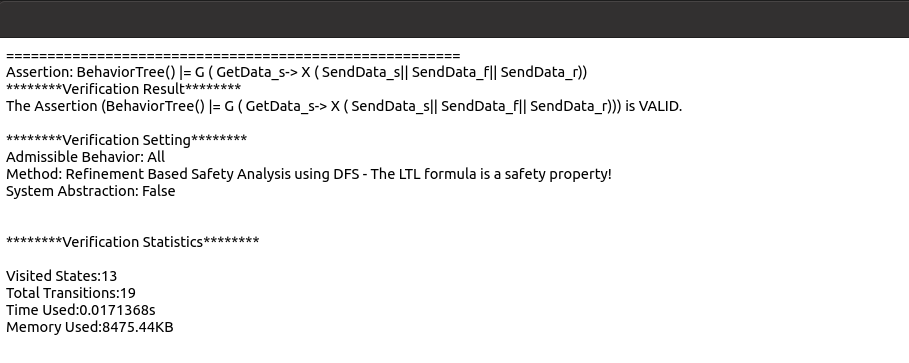
#assert BehaviorTree |= G (GetData_s -> X(SendData_s || SendData_f || SendData_r));
This assert means that only after the Mars-Rover has successfully got the data can it perform send data.
(5) Result
CASE8: Mars-Rover GetData BT Refinement
(1) Description
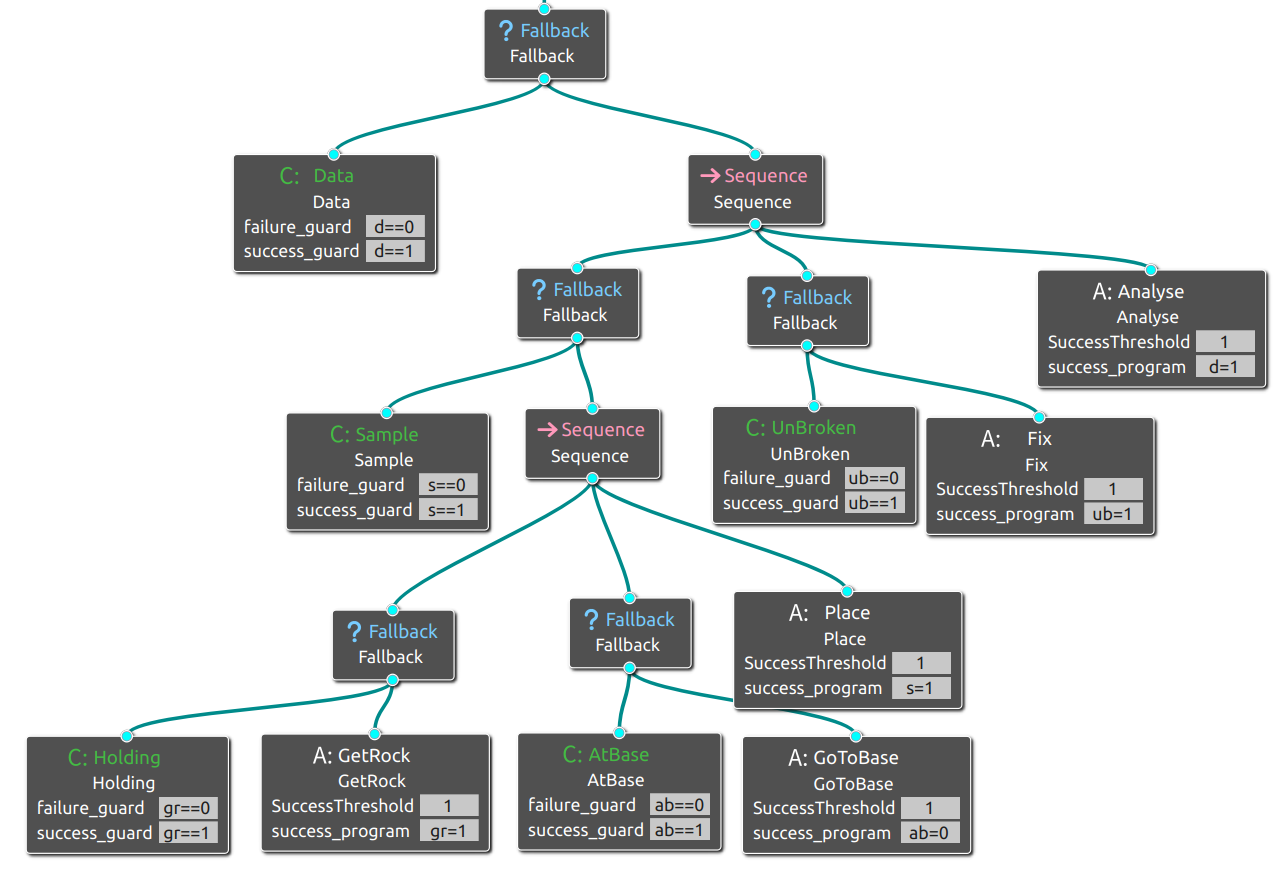
This behavior tree is a refinement of GetData in Mars-Rover (Figure 2 in paper Improving the Performance of Backward Chained Behavior Trees that use Reinforcement Learning ).
Assume that the Mars-Rover must actively find rock samples and bring them to a base station to be analysed. Occasionally a component on the base station will break, which the robot must fix before it can analyze any new rocks.
(2) Behavior Tree
(3) Variables
Name: d (has data?) Name: s (has sample?) Name: gr (get rock?)
Value: 0,1 Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 0 Initial Value: 0 Initial Value: 0
Name: ab (at base?) Name: ub (component unbroken?)
Value: 0,1 Value: 0,1
Meaning: 0: no. 1: yes. Meaning: 0: no. 1: yes.
Initial Value: 0 Initial Value: 0
(4) Property
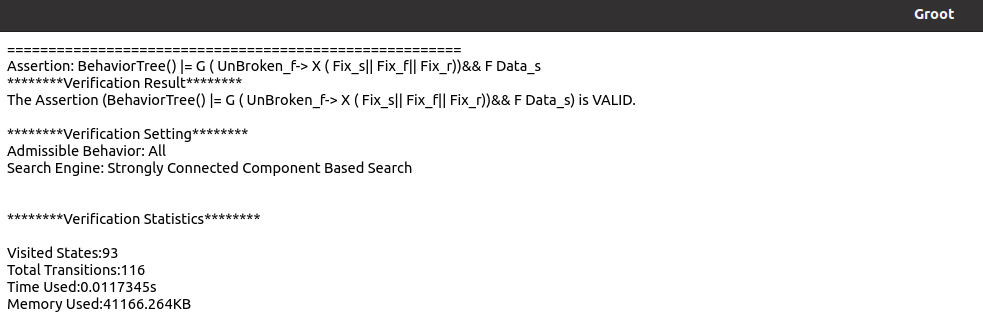
#assert BehaviorTree |= G (UnBroken_f -> X(Fix_s || Fix_f || Fix_r)) && F Data_s ;
This assert means that once the Mars-Rover finds that the component is broken, it should fix it immediately, and the Mars-Rover can eventually get the data.
(5) Result
CASE9: Patrol
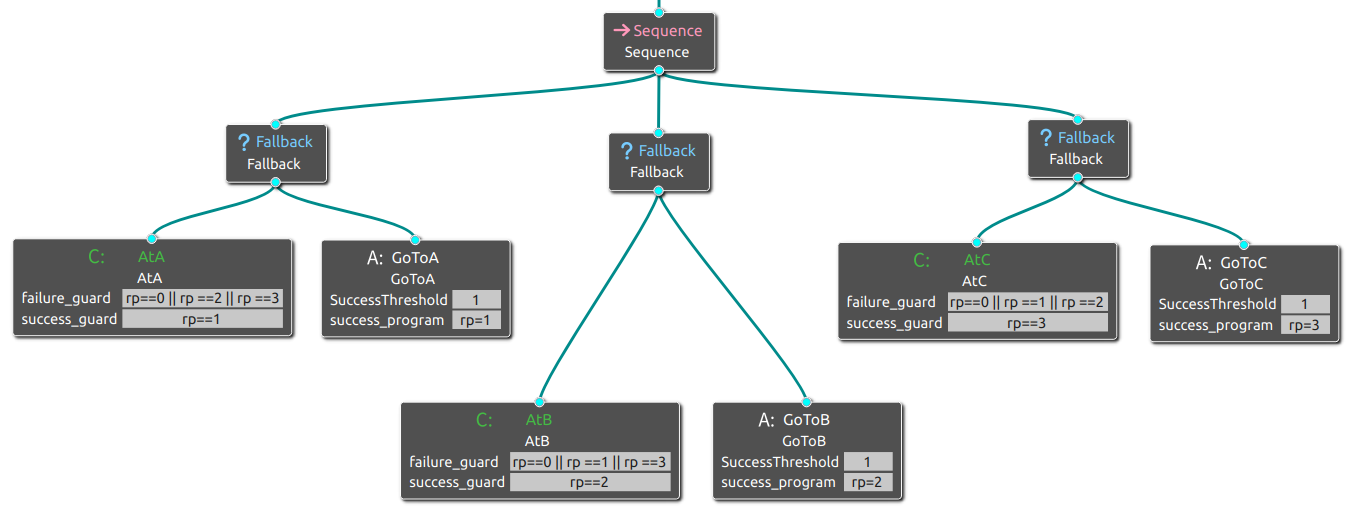
(1) Description
The robot is asked to infinitely visit position A, B and C.
(2) Behavior Tree
(3) Variables
Name: rp (robot position?)
Value: 0,1,2,3
Meaning: 0: unkown. 1: At A. 2: At B. 3: At C.
Initial Value: 0
(4) Property
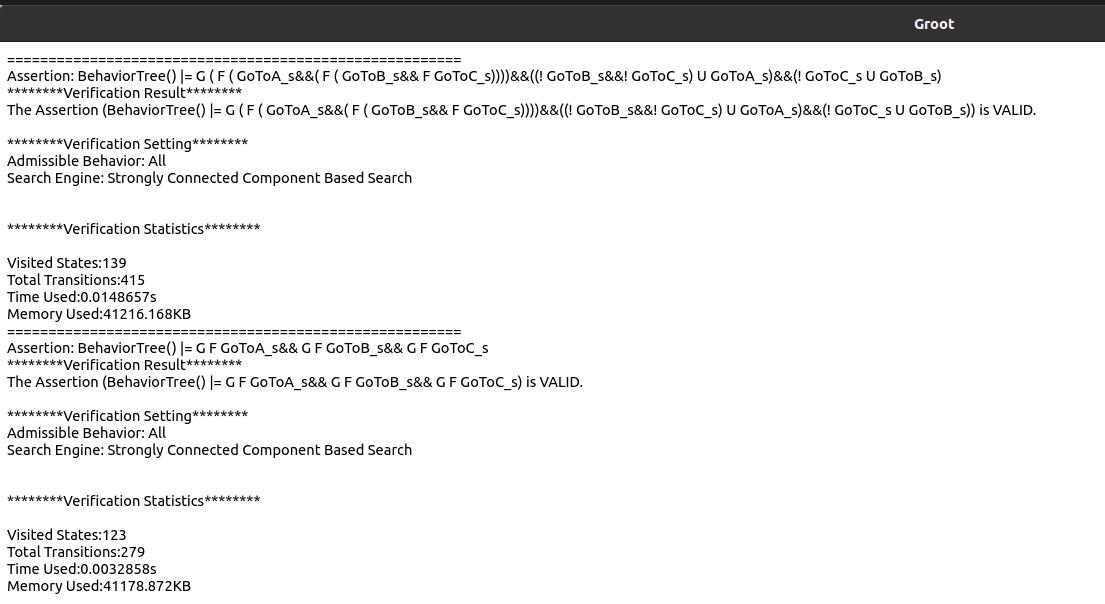
#assert BehaviorTree |= G F GoToA_s && G F GoToB_s && G F GoToC_s ;
#assert BehaviorTree |=G (F (GoToA_s && (F (GoToB_s && F GoToC_s)))) && ((!GoToB_s && !GoToC_s) U GoToA_s) && (!GoToC_s U GoToB_s) ;
This first assert means that the robot’s will eventually visit position A, B and C. This second assert means that the robot’s will visit position A, B and C in order.
(5) Result
Contacts
Please feel free to contact us if you have any questions about MoVe4BT.
- Peishan Huang (huang_ps@nudt.edu.cn)
- Weijiang Hong (hongweijiang17@nudt.edu.cn)
- Zhenbang Chen (zbchen@nudt.edu.cn)
- Ji Wang (wj@nudt.edu.cn)